
Energy Autopilot is a startup I founded to create an innovative Home Energy Management System (“HEMS”). We are hard at work on that solution now, working toward releasing it to the world in due course.
The more time our team has spent building Energy Autopilot, the more I’ve come to believe that there is a tremendously important issue about consumer rights, product ownership, and long-term resilience in Australia’s energy transition that needs to be solved.
The Federal Government’s Cheaper Home Batteries Program currently requires subsidised battery systems to be “VPP capable”. On the surface, that sounds sensible enough.
(See the footnote at the end of this post if you’re not familiar with the term ‘VPP’)
The problem is that the phrase “VPP capable” is presently vague and essentially undefined in the scheme, with manufacturers self-certifying their compliance to this requirement.
This lack of specificity means that a manufacturer is considered to technically comply (and be subsidised) even if they are in fact locking customers into a single, vendor-determined and typically vendor-controlled VPP ecosystem that suits the manufacturer’s commercial interests.
No wonder the take-up of VPP’s amongst consumers has been very small indeed – they’re a very unattractive thing in the modern world…
… Why would you want to hand over total control of the battery you paid for, back to its manufacturer, to let them wear it out for their benefit, and not yours?
Other VPPs might be better value for you than the one that suits the manufacturer, but they aren’t available for you to choose from, because the manufacturer typically doesn’t allow them to be.
That isn’t the sort of interoperability consumers would expect from the notion of their device being ‘VPP Capable’
And more importantly, it isn’t even true ownership of the expensive device that you just paid for.
If you buy a home battery system, you should be able to decide how it operates, which software controls it, and which energy optimisation technology you want to use — whether that’s a legacy VPP, a locally operating Home Energy Management System (HEMS), or some future innovation that hasn’t even been invented yet.
At present, that freedom of choice across battery equipment vendors simply does not exist.
From a technical perspective, battery systems can be controlled in two ways:
- Through a vendor-operated cloud portal; and/or
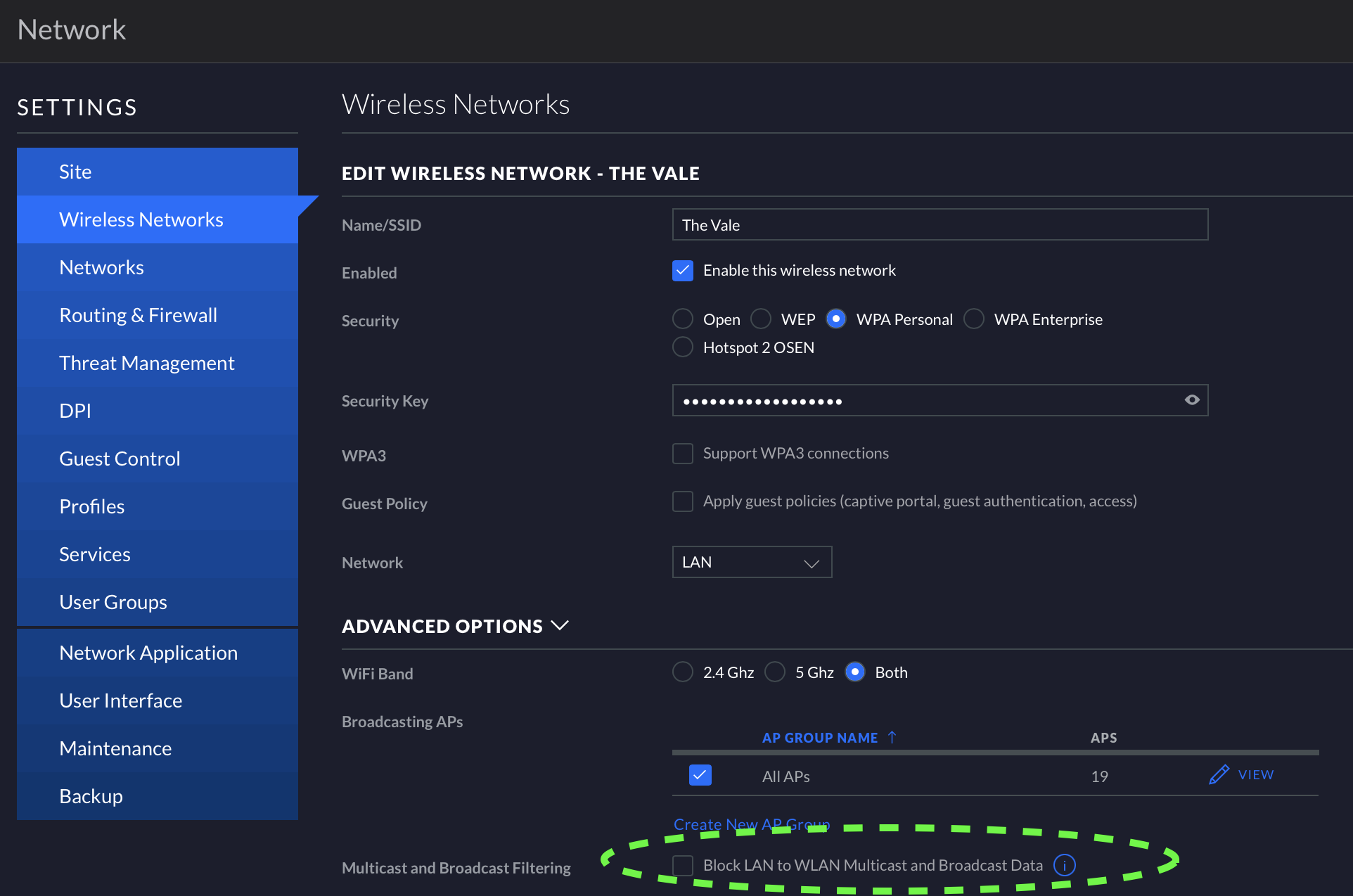
- Through a direct local interface (an “API”) on the customer’s own network.
The second option – vendor-supported local control – matters enormously, but it is often absent, today.
Some equipment makers, like Victron Energy, are gold standard exemplars of documented, open, control interfaces. Their equipment is a joy to work with, as a software control systems vendor.
For many other battery electronics platforms, geeks have often discovered that a local API exists, and have reverse-engineered it (figured out how to use it, despite a lack of documentation).
In many cases, though, the manufacturer has then broken things by changing the undocumented local interface without warning, or – far worse – by removing that interface entirely through a remote software update (Tesla – I’m looking at you…)
A local control interface means the system can continue operating:
- without Internet access,
- without dependence on a vendor specific cloud service,
- without vendor-determined future cloud subscription fees,
- and without the risk of a manufacturer simply deciding they no longer wish to support third-party cloud access, and just turning it off.
Cloud services are extremely useful.
But they should not be the only way that consumers can control equipment they have already purchased. Consumers need freedom of choice to select software control solutions for their hardware that suit their needs, and the freedom of choice to change their minds over time about which solution they use.
We’ve seen this movie before.
The technology industry is unfortunately littered with examples of products that stopped functioning properly because the vendor:
- shut down their cloud platform,
- abandoned the market,
- introduced punitive access charges,
- or simply lost interest in continuing support.
The proposal I have been discussing for some time draws parallels with earlier consumer protection developments such as:
- “Right to Repair” legislation,
- and the right to have motor vehicles serviced outside manufacturer dealer networks.
Energy infrastructure – technically called CER (Consumer Energy Resources) deserves the same treatment.
A home battery is not a disposable gadget! It is long-lived critical infrastructure sitting in somebody’s house, often representing an investment of tens of thousands of dollars.
Consumers should not wake up one day to discover that:
- the vendor cloud has vanished,
- third-party access now costs money,
- or innovative new optimisation platforms are excluded because they threaten the incumbent manufacturer’s business model.
Unfortunately, these are not hypothetical risks. As I noted in the attached proposal:
- Redflow’s battery management cloud services disappeared overnight when the company entered administration,
- Enel X effectively orphaned residential EV chargers across North America when they lost interest in that market,
- Belkin shut down support for most of its Wemo ecosystem,
- and Insteon rendered all of its customer devices inoperative after shutting down its services.
The irony is that many of these products already contain perfectly functional local control interfaces.
They’re simply not always documented, enabled, or made accessible to consumers and independent software developers. And today there’s no guarantee, even if a local API is present, that the vendor won’t break them, or take them away entirely, with a future software update.
This is why I believe the Cheaper Home Batteries Program should require something much more specific than the current “VPP capable” wording.
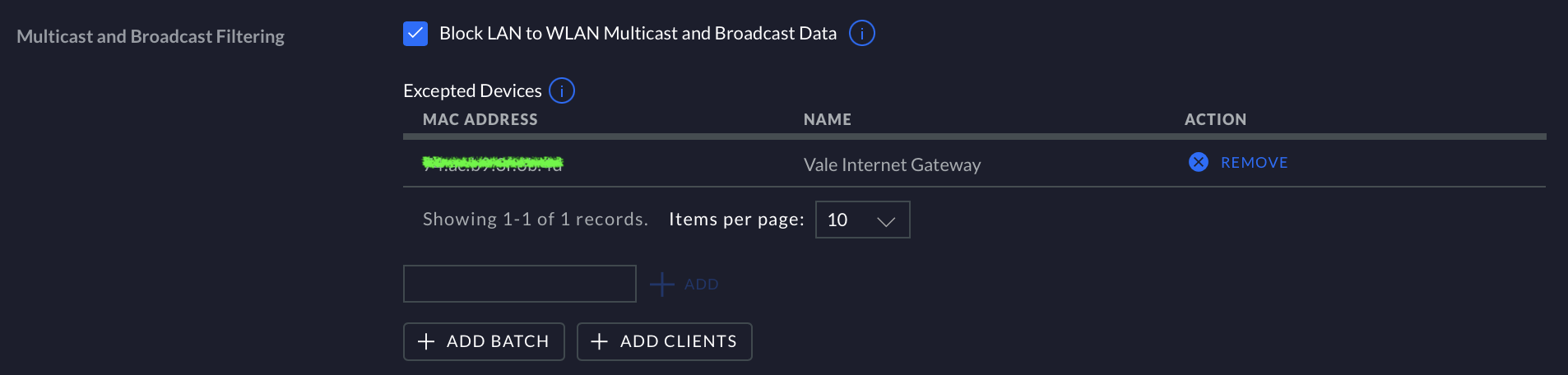
Specifically, government-subsidised battery systems should provide an open, documented, zero-cost local API that:
- works on the customer’s own LAN,
- functions without cloud dependency,
- allows full operational control,
- and remains available for the operational lifetime of the product.
Importantly, none of this prevents manufacturers from continuing to offer their own proprietary VPPs or cloud services!
This proposal is not anti-manufacturer.
It is pro-consumer!
It is about ensuring that Australians who invest in home energy infrastructure retain meaningful long-term control over the systems they purchase.
And ultimately, I think the principles involved are actually very simple:
- Consumers should be free to choose any compatible control solution that suits their needs, from any vendor
- Consumers should not be locked into vendor-controlled ecosystems
- Local control should exist independently of cloud services
- Control APIs should be documented, openly accessible, and free to use
- Control interfaces should continue functioning even if vendor cloud services fail
- Consumers should retain operational control over equipment they own
- Open interfaces encourage innovation, competition, and lower energy costs
And the reasons for this are simple:
- Long-lived energy infrastructure should not depend on the survival of a particular cloud platform
- Consumers only truly own a product if they can fully operate it, at no extra cost, for its full expected lifetime
This could be implemented with a change to the criteria of the Cheaper Home Batteries scheme, as the fast path to a consumer-centric market.
These requirements could then be permanently embedded as a set of consumer rights, through subsequent with regulatory / legislative change, to truly bake these principles in, for good .
This is what has has happened with the ‘right to repair’ and the right to choose a car servicing company without losing your motor vehicle warranty. Both of these rights are now taken for granted in Australia.
True consumer ownership – and flexible consumer choice amongst current and future technical control solutions – for our national fleet of CER (including but not limited to home batteries) – also needs to come with the same set of consumer-centric rights.
Appendix 1 in the attached document is an example of how an amendment to the rules for the Cheaper Home Batteries program could solve this problem overnight.
Footnote: What is a VPP?
A Virtual Power Plant (“VPP”) is a legacy mechanism to leverge home batteries to interoperate with the grid. It is a service you sign up for, that hands control of your battery to a remote third party, making a part of a group of batteries that are operated in unison, as if they are a single, large battery.
This is an increasingly unattractive approach for consumers, because it is the VPP operator, not the battery owner, who decides how, and when, the battery buys and sells power, and it is also the VPP operator who controls the profit distribution to the owner (if any) from the operating a battery whose hardware was funded by the consumer, not the VPP operator.
The modern alternative is a Home Energy Management System (“HEMS”), that operates your battery as a Real Power Plant. This software works for you directly, controlling the decisions to buy and sell power, based on the real time cost of power at your premises. WIth a HEMS, you retain agency over where your energy goes, and you retain all of the benefits from operating the battery that you paid for.















You must be logged in to post a comment.